14.2.3. Example name spaced nonlinear SDOF¶
The source code is developed by Maxim Millen from University of Porto.
The source code is shown below, which can be downloaded
here.Also download the
ground motion fileMake sure the numpy, matplotlib and eqsig packages are installed in your Python distribution.
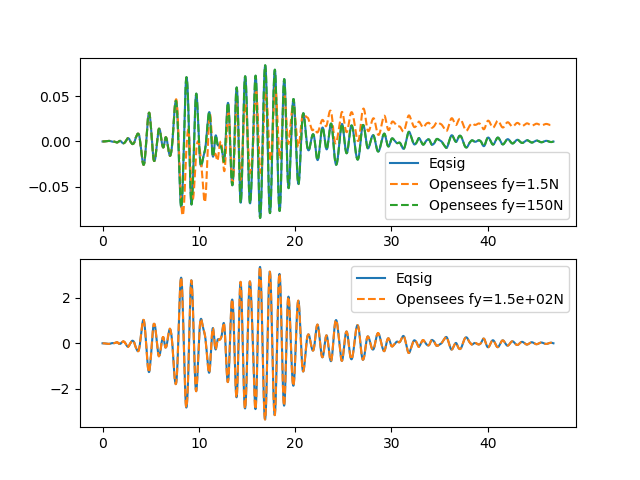
Run the source code in your favorite Python program and should see
1import requests
2import eqsig
3import matplotlib.pyplot as plt
4import numpy as np
5from os.path import exists
6
7import openseespy.opensees as op
8
9
10### Generating Constants #############
11class opensees_constants:
12 def __init__(self):
13 self.FREE = 0
14 self.FIXED = 1
15
16 self.X = 1
17 self.Y = 2
18 self.ROTZ = 3
19
20opc = opensees_constants()
21
22
23def get_inelastic_response(mass, k_spring, f_yield, motion, dt, xi=0.05, r_post=0.0):
24 """
25 Run seismic analysis of a nonlinear SDOF
26
27 :param mass: SDOF mass
28 :param k_spring: spring stiffness
29 :param f_yield: yield strength
30 :param motion: list, acceleration values
31 :param dt: float, time step of acceleration values
32 :param xi: damping ratio
33 :param r_post: post-yield stiffness
34 :return:
35 """
36
37 op.wipe()
38 op.model('basic', '-ndm', 2, '-ndf', 3) # 2 dimensions, 3 dof per node
39
40 # Establish nodes
41 bot_node = 1
42 top_node = 2
43 op.node(bot_node, 0., 0.)
44 op.node(top_node, 0., 0.)
45
46 # Fix bottom node
47 op.fix(top_node, opc.FREE, opc.FIXED, opc.FIXED)
48 op.fix(bot_node, opc.FIXED, opc.FIXED, opc.FIXED)
49 # Set out-of-plane DOFs to be slaved
50 op.equalDOF(1, 2, *[2, 3])
51
52 # nodal mass (weight / g):
53 op.mass(top_node, mass, 0., 0.)
54
55 # Define material
56 bilinear_mat_tag = 1
57 mat_type = "Steel01"
58 mat_props = [f_yield, k_spring, r_post]
59 op.uniaxialMaterial(mat_type, bilinear_mat_tag, *mat_props)
60
61 # Assign zero length element
62 beam_tag = 1
63 op.element('zeroLength', beam_tag, bot_node, top_node, "-mat", bilinear_mat_tag, "-dir", 1, '-doRayleigh', 1)
64
65 # Define the dynamic analysis
66 load_tag_dynamic = 1
67 pattern_tag_dynamic = 1
68
69 values = list(-1 * motion) # should be negative
70 op.timeSeries('Path', load_tag_dynamic, '-dt', dt, '-values', *values)
71 op.pattern('UniformExcitation', pattern_tag_dynamic, opc.X, '-accel', load_tag_dynamic)
72
73 # set damping based on first eigen mode
74 eigen_1 = op.eigen('-fullGenLapack', 1)
75 angular_freq = eigen_1[0] ** 0.5
76 alpha_m = 0.0
77 beta_k = 2 * xi / angular_freq
78 beta_k_comm = 0.0
79 beta_k_init = 0.0
80
81 op.rayleigh(alpha_m, beta_k, beta_k_init, beta_k_comm)
82
83 # Run the dynamic analysis
84
85 op.wipeAnalysis()
86
87 op.algorithm('Newton')
88 op.system('SparseGeneral')
89 op.numberer('RCM')
90 op.constraints('Transformation')
91 op.integrator('Newmark', 0.5, 0.25)
92 op.analysis('Transient')
93
94 tol = 1.0e-10
95 iterations = 10
96 op.test('EnergyIncr', tol, iterations, 0, 2)
97 analysis_time = (len(values) - 1) * dt
98 analysis_dt = 0.001
99 outputs = {
100 "time": [],
101 "rel_disp": [],
102 "rel_accel": [],
103 "rel_vel": [],
104 "force": []
105 }
106
107 while op.getTime() < analysis_time:
108 curr_time = op.getTime()
109 op.analyze(1, analysis_dt)
110 outputs["time"].append(curr_time)
111 outputs["rel_disp"].append(op.nodeDisp(top_node, 1))
112 outputs["rel_vel"].append(op.nodeVel(top_node, 1))
113 outputs["rel_accel"].append(op.nodeAccel(top_node, 1))
114 op.reactions()
115 outputs["force"].append(-op.nodeReaction(bot_node, 1)) # Negative since diff node
116 op.wipe()
117 for item in outputs:
118 outputs[item] = np.array(outputs[item])
119
120 return outputs
121
122
123def show_single_comparison(acc_signal):
124 """
125 Create a plot of an elastic analysis, nonlinear analysis and closed form elastic
126
127 :param acc_signal: input acceleration ground motion (as eqsig.AccSignal)
128
129 :return:
130 """
131
132 rec = acc_signal.values
133 motion_step = acc_signal.dt
134
135 period = 1.0
136 xi = 0.05
137 mass = 1.0
138 f_yield = 1.5 # Reduce this to make it nonlinear
139 r_post = 0.0
140
141 periods = np.array([period])
142 resp_u, resp_v, resp_a = eqsig.sdof.response_series(motion=rec, dt=motion_step, periods=periods, xi=xi)
143
144 k_spring = 4 * np.pi ** 2 * mass / period ** 2
145 outputs = get_inelastic_response(mass, k_spring, f_yield, motion=rec, dt=motion_step, xi=xi, r_post=r_post)
146 outputs_elastic = get_inelastic_response(mass, k_spring, f_yield * 100, rec,
147 motion_step, xi=xi, r_post=r_post)
148 ux_opensees = outputs["rel_disp"]
149 ux_opensees_elastic = outputs_elastic["rel_disp"]
150
151 bf, sps = plt.subplots(nrows=2, figsize=(10,7.5))
152 sps[0].plot(acc_signal.time, resp_u[0], label="Eqsig")
153 sps[0].plot(outputs["time"], ux_opensees, label=f"Opensees fy={f_yield:.3g}N", ls="--")
154 sps[0].plot(outputs["time"], ux_opensees_elastic, label=f"Opensees fy={(f_yield * 100):.3g}N", ls="--")
155 sps[1].plot(acc_signal.time, resp_a[0], label="Eqsig") # Elastic solution
156 time = acc_signal.time
157 acc_opensees_elastic = np.interp(time, outputs_elastic["time"], outputs_elastic["rel_accel"]) - rec
158 print("diff", sum(acc_opensees_elastic - resp_a[0]))
159 sps[1].plot(time, acc_opensees_elastic, label=f"Opensees fy={(f_yield * 100):.2g}N", ls="--")
160 sps[0].set_xlim(xmin=0, xmax=None)
161 sps[0].legend()
162 sps[1].set_xlim(xmin=0, xmax=None)
163 sps[1].legend()
164 for sp in sps:
165 sp.legend()
166 sp.set_xlabel('Time (s)')
167 sp.grid(True)
168 sps[0].set_ylabel('Displacements (m)')
169 sps[1].set_ylabel('Accelerations (m/s^2)')
170 plt.show()
171
172
173if __name__ == '__main__':
174 ### Importing Ground Motion #############
175 if exists('test_motion_dt0p01.txt'):
176 with open('test_motion_dt0p01.txt','r') as filestream:
177 eq_motion = [float(item.strip()) for item in filestream if item.strip() != '']
178 else:
179 eq_url = r'https://openseespydoc.readthedocs.io/en/latest/_downloads/92ed0c80b09bea0d28bf940a5dc4c3f4/test_motion_dt0p01.txt'
180 response = requests.get(eq_url)
181 # response.encoding = "utf-8" # utf-8 or iso8859-1
182 #eq_motion = response.text.split('\n')
183 eq_motion = [float(item.strip()) for item in response.text.split('\n') if item.strip() != '']
184
185 eq_motion_dt = 0.01
186
187 acc_signal = eqsig.AccSignal(eq_motion, eq_motion_dt)
188
189 ### Running Analysis #############
190 show_single_comparison(acc_signal)